
(CNN) – Los humanoides que se encargan de las tareas del hogar o construyen hábitats en la superficie lunar pueden sonar como algo de ciencia ficción. Pero el equipo de la startup de robótica Apptronik, con sede en Austin, prevé un futuro en el que los robots de propósito general manejarán trabajos “aburridos, sucios y peligrosos” para que los humanos no tengan que hacerlo.
El diseño del último robot humanoide de Apptronik, llamado Apollo, se dio a conocer el miércoles.
El robot tiene la misma escala que un ser humano, mide 1,7 metros de altura y pesa 72,6 kilogramos.
Apollo puede levantar 25 kilogramos y ha sido diseñado para ser producido en masa y trabajar de manera segura junto a los humanos. El robot utiliza electricidad, en lugar de sistemas hidráulicos que no se consideran tan seguros, y tiene una batería de cuatro horas que se puede cambiar para que pueda funcionar durante una jornada laboral de 22 horas.

Apollo es el último robot humanoide de Apptronik. Crédito: Cortesía de Apptroni.
Para evitar el territorio del “valle inquietante”, un fenómeno en el que los humanos se sienten incómodos con la apariencia de un robot humanoide, la empresa Argodesign, con sede en Austin, equipó a Apollo con características que están destinadas a sentirse accesibles, e incluso amigables.
El robot tiene paneles digitales en su pecho que brindan una comunicación clara sobre la duración restante de la batería, la tarea actual en la que está trabajando, cuándo terminará y qué hará a continuación. Apolo también tiene rostro y movimientos intencionados, como girar la cabeza para indicar hacia dónde irá.
El objetivo inicial de Apollo es ponerlo a trabajar en logística, asumiendo funciones físicamente exigentes dentro de los almacenes para mejorar la cadena de suministro abordando la escasez de mano de obra. Pero el equipo de Apptronik tiene una visión a largo plazo para Apollo que se extenderá al menos durante la próxima década.
“Nuestro objetivo es construir robots versátiles para hacer todas las cosas que no queremos hacer para ayudarnos aquí en la Tierra y, eventualmente, algún día explorar la Luna, Marte y más allá”, dijo Jeff Cárdenas, cofundador y director ejecutivo de Apptronik.
Diseñando un humanoide
Antes de fundar Apptronik en 2016, los miembros del equipo trabajaron en el Laboratorio de Robótica Centrada en las Personas de la Universidad de Texas en Austin.

Los miembros del equipo de Apptronik trabajaron en el diseño de Valkyrie, que inspiró a Apollo. Crédito: Bill Stafford/NASA/JSC.
“El enfoque del laboratorio se centró en cómo los humanos y los robots interactuarán en el futuro”, dijo Cárdenas. “Como humanos, nuestro recurso más valioso es el tiempo, y nuestro tiempo aquí es limitado. Y como fabricantes de herramientas, ahora podemos construir para nosotros herramientas que nos devuelvan más tiempo”.
Mientras estaba en el laboratorio, el equipo fue seleccionado para trabajar en Valkyrie, un robot de la NASA, durante el DARPA Robotics Challenge entre 2012 y 2013.
El robot, que mide 1,9 metros de alto y pesa 136 kilogramos, es un robot humanoide bípedo capaz de manipular y caminar con destreza (incluso sobre y alrededor de obstáculos), transportar artículos y abrir puertas. según Shaun Azimi, líder del hábil equipo de robótica del Centro Espacial Johnson de la NASA en Houston.

El robot Valkyrie se someterá a un nuevo experimento en Australia como cuidador remoto. Crédito: NASA/JSC.
El robot eléctrico ha sido modificado y mejorado desde su debut en 2013, y actualmente se está probando como un cuidador remoto de instalaciones de energía no tripuladas y en alta mar en Australia.
Las raíces de Apollo están en el diseño de Valkyrie, y el equipo de Apptronik ha pasado años construyendo robots y componentes únicos que culminaron en un humanoide que podría funcionar en entornos diseñados para personas. Los robots de la línea de montaje a menudo se atornillan al suelo o se conectan a una pared y solo pueden funcionar en espacios diseñados para acomodarlos, dijo Cárdenas.
En lugar de robots altamente especializados que sólo pueden cumplir un propósito, Apptronik quería que Apollo fuera el “iPhone de los robots”, dijo Cárdenas.
“El objetivo es construir un robot que pueda hacer miles de cosas diferentes”, afirmó. “Es una actualización de software la que nos separa de realizar una nueva tarea o un nuevo comportamiento”.
Eventualmente, Apollo será menor que el precio del automóvil promedio. Los robots tradicionales dependen de piezas de alta precisión. Pero la introducción de cámaras y sistemas de inteligencia artificial ha permitido el desarrollo de robots que dependen menos de la preprogramación y, en cambio, responden mejor a sus entornos, lo que significa que las piezas utilizadas en la producción son más asequibles, dijo Cárdenas.
Este año, Apptronik se centra en conseguir clientes comerciales y fabricantes que estén interesados en cómo Apollo podría mejorar su logística. La compañía tiene como objetivo estar en plena producción comercial para fines de 2024.
Apollo comenzará en entornos de fábrica y almacén realizando tareas sencillas, como mover cajas y empujar carros. Pero con el tiempo, la funcionalidad de Apollo aumentará a través de nuevos modelos y actualizaciones hasta el punto de que podría usarse en la construcción, la producción de productos electrónicos, espacios comerciales, entrega a domicilio e incluso el cuidado de personas mayores.
Moviéndose como un humano
En el corazón del diseño de Apollo se encuentran los actuadores o músculos robóticos. El equipo de Apptronik ha trabajado en más de 35 iteraciones de los actuadores centrales que permiten a Apollo caminar, flexionar los brazos y agarrar objetos como un humano.
“Los humanos tenemos alrededor de 300 músculos en nuestro cuerpo”, dijo el Dr. Nick Paine, cofundador y director de tecnología de Apptronik. “Como ingenieros, nuestro objetivo es simplificar la complejidad, por lo que el robot Apollo tiene alrededor de 30 grupos de músculos diferentes dentro de su sistema que necesita para realizar acciones y actividades básicas”.
Apollo is here! The moment that we’ve been building towards has finally arrived as we put our humanoid robot, Apollo, into the world for the first time. https://t.co/C3ESdB3pmI
— Apptronik (@Apptronik) August 23, 2023
Antes de Apollo, Apptronik se centró en lo que llamó un robot humanoide de desarrollo rápido. Si bien incluía capacidades de manipulación limitadas y brazos simples, el objetivo del diseño era mejorar la locomoción del robot.
“La forma en que desarrollamos la robótica es que realmente tratas de que el hardware y el software maduren al unísono entre sí”, dijo Paine.
La cabeza de Apollo contiene una cámara de percepción, mientras que los sensores en su torso ayudan al robot a trazar una vista de 360 grados de su entorno y determinar dónde puede moverse. El “cerebro” o computadora principal del robot también se encuentra en su pecho.
Los sensores ayudan al robot a mantenerse orientado mientras camina sobre obstáculos o alrededor de ellos. Este tipo de locomoción será clave a medida que Apolo se abre camino hacia entornos más inciertos, como el aire libre y, algún día, incluso la superficie de la luna.
“Los robots deben poder trabajar en el mismo tipo de caos e incertidumbre en el que los humanos pueden existir“, dijo Paine.
Eventualmente, Apollo será autónomo, pero el equipo de Apptronik todavía quiere que haya un nivel de control sobre lo que hará el robot. Si bien los controles funcionarán primero a través de tabletas o dispositivos inteligentes, en el futuro un humano debería poder acercarse al Apolo y decirle qué hacer, dijo Cárdenas.
A la luna y más allá
Apptronik es uno de los socios de la NASA que trabaja en diseños de robots humanoides. La Tierra es un campo de pruebas para el Apolo y, algún día, una versión futura del robot podría funcionar en condiciones espaciales peligrosas para que los humanos no tengan que hacerlo.
Se necesitarán varios pasos en el desarrollo para preparar robots humanoides para trabajar en el vacío del espacio, de modo que el Apolo podría ir primero a la Estación Espacial Internacional, dijo Paine.
“Para la exploración espacial, realmente necesitamos sistemas que tengan más de una habilidad que sean flexibles y adaptables, tanto para una variedad de tareas que conocemos como para algunas tareas que no anticiparemos hasta que realmente surjan en el curso de exploración”, dijo Azimi.
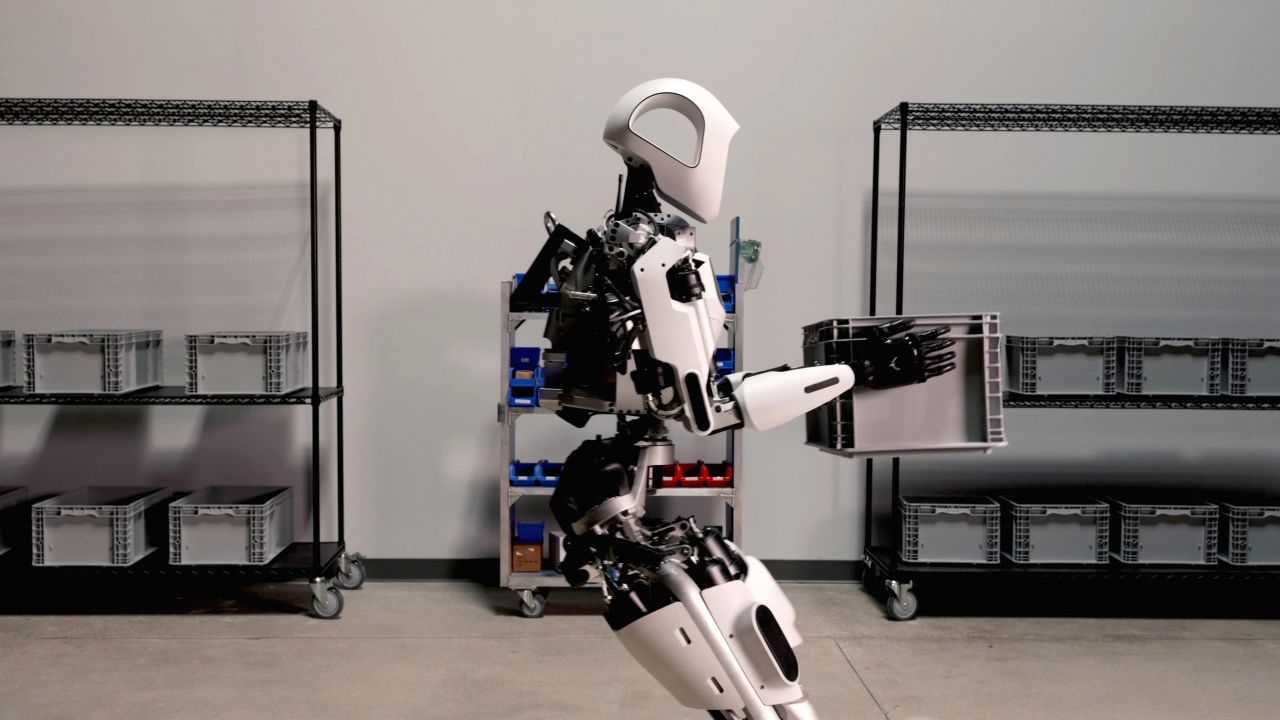
Apollo es capaz de identificar cajas y bolsas, recogerlas y colocarlas. Crédito: Cortesía de Apptronik.
La arquitectura actual del programa Artemis de la NASA, que tiene como objetivo devolver a los humanos a la luna y eventualmente realizar misiones tripuladas a Marte, prevé un rover presurizado en la superficie lunar tan pronto como la misión Artemis VI programada para 2030, dijo Azimi. Este período de exploración lunar a principios de la década de 2030 es cuando Azimi cree que los robots como Apollo también podrían ser útiles.
El beneficio de utilizar robots humanoides como Apollo en el espacio es que podrían usarse para construir y probar entornos diseñados pensando en los humanos, como los hábitats lunares y marcianos, antes de que lleguen los astronautas. Pero los robots enfrentarán desafíos y deberán diseñarse con menos limitaciones que sus contrapartes terrestres. Por ejemplo, un robot humanoide puede necesitar arrastrarse dentro del entorno de un rover de tamaño similar a un vehículo recreativo y aun así tener la fuerza y flexibilidad para abrir puertas presurizadas, dijo Azimi.
“Mi esperanza y mi sueño es que tengamos robots de uso general que se desplieguen en el espacio dentro de los próximos 10 años y que podamos obtener algunos de los beneficios de tener sistemas robóticos que permitan a la tripulación concentrarse mucho más en cosas que los humanos hacen mejor: explorar y hacer descubrimientos científicos”, dijo Azimi.


Martes / 22:30 / CNN Chile
Deja tu comentario